Einleitung
- Worum geht es:
- Simulink einsetzen können, um Messprobleme mit
Kalman-Filter zu simulieren
- Was wird nicht behandelt:
- Mathematik des Kalman-Filters
aber Angabe der Grundgleichungen und Motivation
- fortgeschrittene Anwendungen aus dem
Vermessungsbereich
aber einfache Grundideen der Trägheitsnavigation
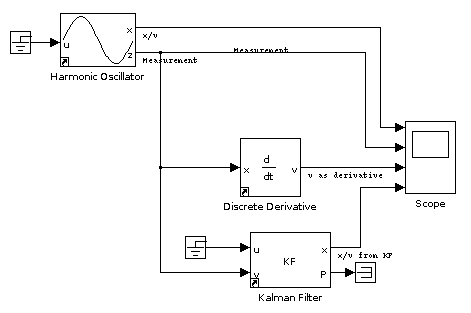
- Beispiel:
- Modell schwingX.mdl
- benutzt Blockbibliothek kalmanlib.mdl
- Geschwindigkeit eines harmonischen Schwingers soll
bestimmt werden
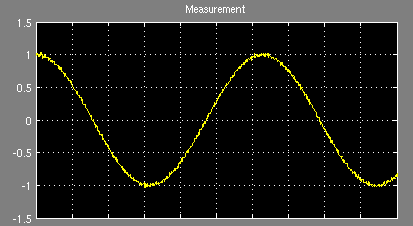
- Messung liefert nur Ort, leicht verrauscht
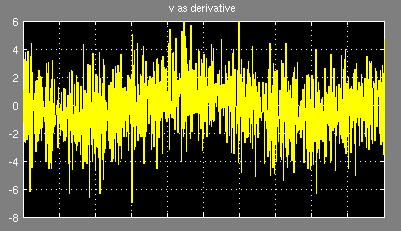
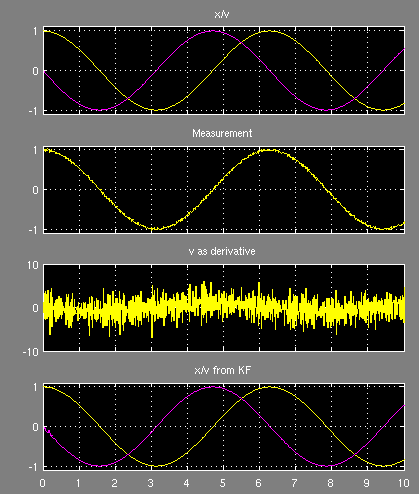
- naive Rekonstruktion von v als (diskreter)
Ableitung liefert Unsinn
- Rekonstruktion mit Kalman-Filter ergibt sehr gute
Übereinstimmung