- beschreibt harmonische Schwingungen x(t)
- angetrieben durch äußere Kraft F(t)
- Bewegungsgleichung
- Parameter
-
ω0 Kreisfrequenz 2πf x0 Anfangsauslenkung v0 Anfangsgeschwindigkeit u(t) äußere Beschleunigung F(t)/m
-
- Modell besteht aus Blöcken mit Ein- und Ausgängen
- Blöcke werden durch Leitungen verbunden (natürlich Ausgang mit Eingang)
- auf den Leitungen liegen Signale, die in bestimmtem Zeitschritten
aktualisiert werden
- diskrete Systeme: Zeitpunkte festgelegt (meistens mit fester Frequenz)
- kontinuierliche Systeme (Differentialgleichungen): Zeitpunkte werden vom DGL-Solver bestimmt
- Vorgehensweise
- DGL nach höchster Ableitung auflösen (hier
 )
) 
- Signal x festlegen
- Integrator davor → am Eingang liegt

- Integrator vor →
am Eingang liegt
- durch geeignete Schleife Differentialgleichung zusammenbauen
- DGL nach höchster Ableitung auflösen (hier
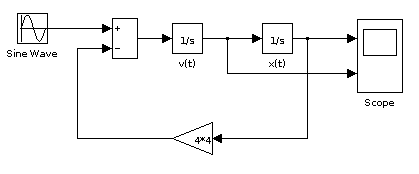
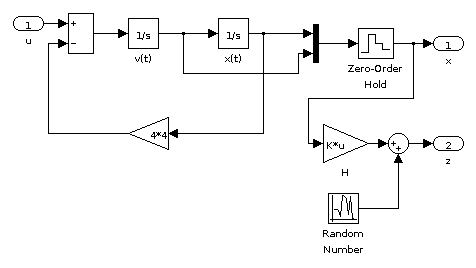
- Modell model_harmonic.mdl
- Details zum Aufbau
- Blöcke aus Simulink-Bibliothek holen
- Gain-Block mit Format/Flip Block spiegeln
- Oscilloscope öffnen, Parameters öffnen, Number of axes = 2
- Leitungen verlegen, Abzweigungen mit <STRG>-Klick
- Oscilloscope etwas vergrößern
- Sine Wave öffnen, Frequency = 3
- Gain öffnen, Gain = 4*4
- Format/Hide Name bei Subtract und Gain
- Namen der Integratoren auf v(t) bzw. x(t) ändern
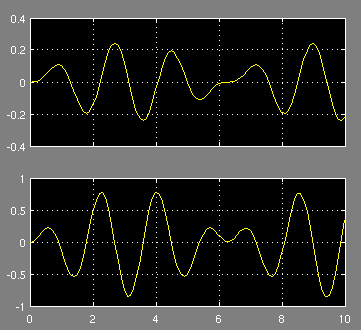
- Simulation starten mit Simulation/Start
- im Osci auf "Fernglas" klicken (optimale Skalenwahl)
- → Bild ist eckig
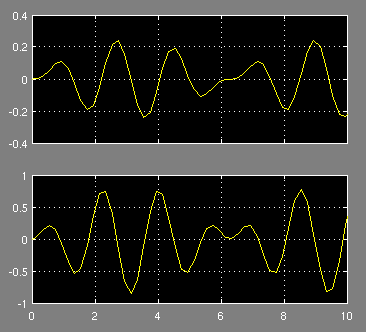
- Simulation/Configuration Parameters öffnen
- Solver/Max Step Size = 0.1 →
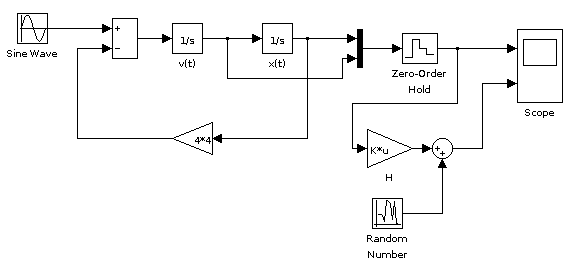
- Modell soll ergänzt werden um Messung incl. Messrauschen
- Ergebnis model_harmonic2.mdl
- Aufbau
- Blöcke hinzufügen: Mux, Zero Order Hold, Gain, Sum, Random Number
- Leitungen zum Osci lösen und neue Signalleitungen legen
- Block-Parameter
-
Block Parameter Wert Zero Order Hold Sample time 0.05 Gain Gain [1,0] Gain Multiplication Matrix(K*u) Random Number Variance 2e-4 Random Number Sample time 0.05
- Ergebnis
- Funktionsweise
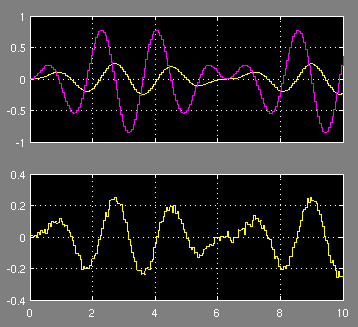
- Multiplexer fasst x und v zu einer Vektorleitung zusammen mit Signal (x, v)T
- Zero Order Hold erzeugt daraus Samplewerte im Abstand dt = 0.05 (Oszi oben)
- Gain macht aus dem Vektorsignal durch Multiplikation mit (1 0) wieder x
- Random Number erzeugt zu jedem Zeitschritt (Sample Time) normalverteilte Zufallszahl mit gegebenem Mittelwert (0) und Varianz (0.0002)
- Ziel: Erzeugen eines universell einsetzbaren Blocks "Harmonischer Oszillator"
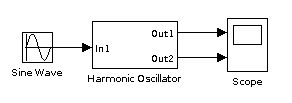
- 1. Schritt: Erzeugen eines Subsystems
- Markiere mit der Maus ganzes Modell außer Sine Wave und Osci
- Edit/Create Subsystem
- Ergebnis (nach Umbenennung und leichter Verschiebung)
- 2. Schritt: wichtige Parameter direkt zugreifbar machen
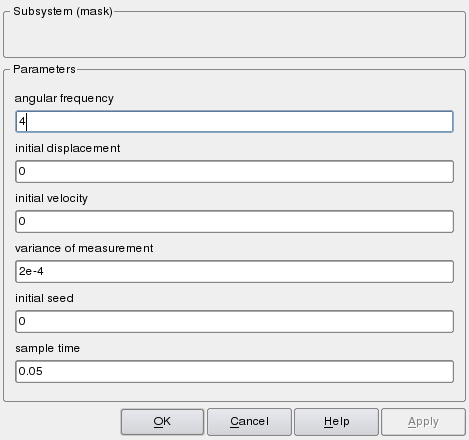
- Edit/Mask Subsystem/Parameters
- Eingabe von Beschriftungen und Variablennamen
-
Beschriftung Variablenname angular frequency omega0 initial displacement x0 initial velocity v0 variance of measurement R initial seed seed sample time dt - Doppelklick → Parametermaske öffnet sich
- Werte eintragen
- Hinweis:
- initial seed initialisiert den Zufallszahlengenerator
- anderer Wert → andere Zahlenfolge
- 3. Schritt: Variablen ins Submodell eintragen
- Subsystem öffnen mit Edit/Look Under Mask
- Eingang In1 umnennen zu u
- Ausgänge Out1/Out2 umnennen zu x/v
- Variablen eintragen:
-
Block Parameter alter Wert neuer Wert Gain Gain 4*4 omega0*omega0 Integrator x(t) Initial condition 0 x0 Integrator v(t) Initial condition 0 v0 Random Number Variance 2e-4 R Random Number Initial Seed 0 seed Random Number Sample time 0.05 dt Zero Order Hold Sample time 0.05 dt
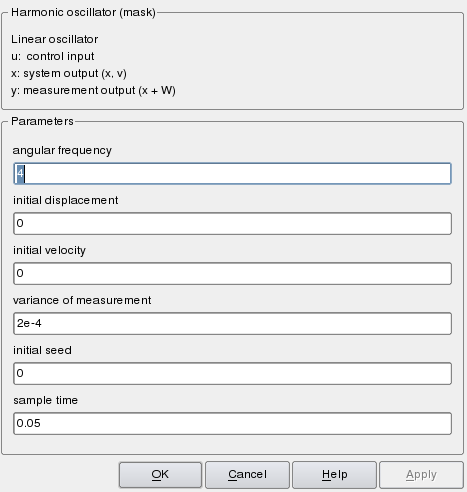
- 4. Schritt: Block dokumentieren
- Edit/Edit Mask/Documentation
- Mask Type
- Harmonic oscillator
- Mask description
- Linear oscillator
u: control input
x: system output (x, v)
y: measurement output (x + W) - Mask help (erscheint bei "Help" in der Matlab-Dokumentation)
- Harmonic oscillator that is sampled
with sample time dt
<ul>
<li>System output x: vector of position and velocity</li>
<li>Measurement output y: measurement of position x, including a normal random noise</li>
<li>Input u: control input, defining an external driving force</li>
</ul> - Parameter-Maske damit
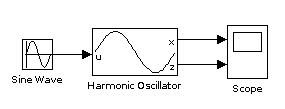
- 5. Schritt: Block verschönern
- Edit/Edit Mask/Icon/Drawing commands
- Erzeugen eines Icons mit Matlab-Zeichen-Kommandos, z.B.
- plot(0:0.1:2*pi,sin(0:0.1:2*pi))
port_label('input', 1, 'u')
port_label('output', 1, 'x')
port_label('output', 2, 'z') - Modell model_harmonic3.mdl damit